|
|
| Sie sind hier: Home < Lok-Decoder < Decoder-Schaltplan |
Der Schaltplan der Lok-DecoderEin Blick auf das
Blockschaltbild des Decoders: |
|
|
|
|
|
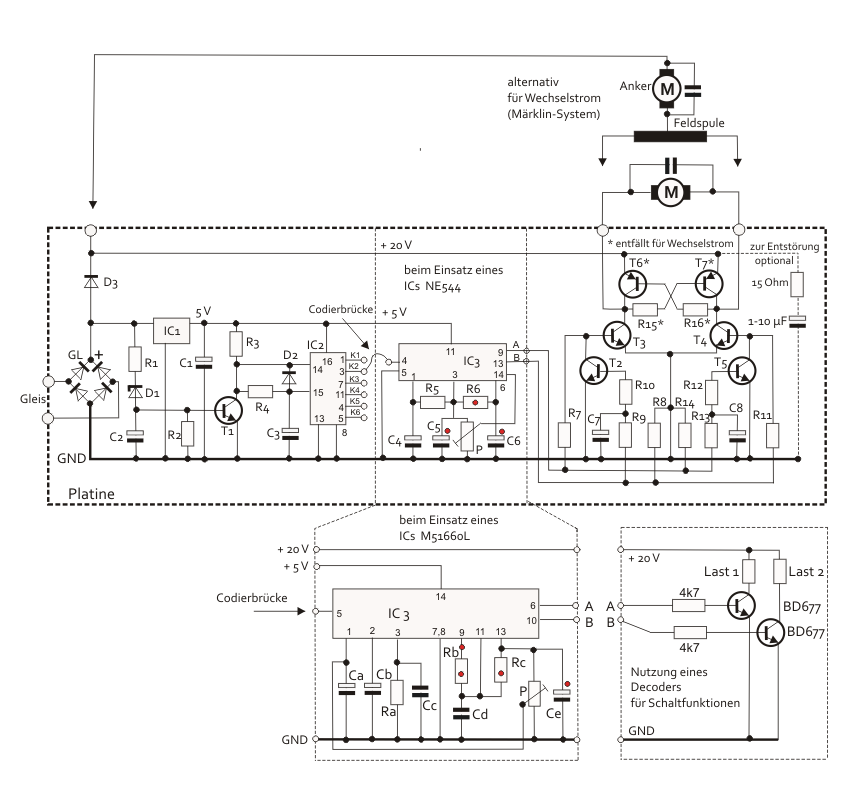
Über das Gleis werden die Fahrspannung mit der überlagerten Impulsfolge übertragen. In der Trennstufe werden zunächst die Fahrbefehl-Impulse abgetrennt und in der Decodierstufe hinsichtlich der Adresse der Lok ausgewertet. Aus den Impulsabständen wird dann der Fahrbefehl abgeleitet und motorgerecht aufbereitet. Im Schaltverstärker schließlich werden die Signale auf den erforderlichen Motorstrom verstärkt. Diese Blöcke finden wir im folgenden Schaltplan für den Decoder mit den ICs NE544 und M51660L wieder:
|
|
Zur Funktion der einzelnen Bauelemente: Zunächst passieren Fahrspannung und überlagerte Steuerimpulsen den Brückengleichrichter GL, der das Aufgleisen der Loks in beliebiger Richtung ermöglicht. Der Festspannungsregler µA78L05 (IC 1) versorgt die Elektronik mit konstant 5 V Spannung, C1 trägt zur Glättung bei. Die Zenerdiode D1 hat eine Durchbruchspannung von 16 V, so dass die Fahrspannung (15 V) vom Transistor T1 ferngehalten wird und nur die Impulse (20 V) den Transistor aufsteuern. Mit R2/C2 werden kurzzeitige Störimpulse abgeblockt. Die der Fahrspannung überlagerten Impulse gelangen an den Clock-Eingang (Pin 14) des Oktalzählers IC2, jeder Impuls setzt den Zähler um eins weiter. In der Synchronisationspause muss der Zähler auf Null zurückgesetzt werden, dafür sorgen R4, C3 und D2: Sperrt T1, so wird C3 über R3/R4 aufgeladen. Schaltet ein Impuls T1 durch, so wird C3 über D2 sehr schnell entladen. Die kurze Impulsfolge sorgt dafür, dass C3 - außer in der Sychronisatonslücke - nicht bis zur Reset-Schwellenspannung des IC2 (Pin 15) aufgeladen wird. An den Ausgängen des Zählers stehen nun die Steuerimpulse für die 6 Loks zur Verfügung. Durch eine Brücke des entsprechenden Ausgangs zum Eingang des IC3 (Pin 4) wird festgelegt, auf welchen Kanal der nachfolgende Servoverstärker reagieren soll. Die ICs NE544 oder M51660L (IC3) sind für Fernsteuerungen entwickelt worden. Dieser integrierte Schaltkreis dekodiert PPM-Steuerimpulse hinsichtlich ihrer Impulsabstände und leitet aus dieser Information eine impulsbreitenmodulierte Motorspannung ab. Ein interner monostabiler Multivibrator erzeugt Referenzimpulse, deren Länge mit Hilfe des Trimmpotentiometers P auf 1,5 ms Länge eingestellt wird. Impulse mit Abständen zwischen 1,5 ms und 2,0 ms ergeben Vorwärtsfahrt der Lok, wobei die Geschwindigkeit proportional zur Differenz zu 1,5 ms ist; umgekehrte Fahrtrichtung ergibt sich zwischen 1,0 ms und 1,5 ms. Der Komparator im IC vergleicht die Abstände der ankommenden Impulse mit der Länge des Referenzimpulses und leitet aus der Differenz durch Impulsdehnung Motorsteuerimpulse ab, die, durch Ausgangstreiber verstärkt, an den Ausgängen A (NE544: Pin 9, M51660L: Pin6) und B (NE544: Pin 13, M51660L: Pin10) zur Verfügung stehen. |
| Erzeugung der Steuerimpulse im NE 544 bzw. M51660L | |
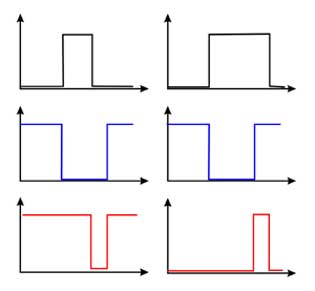 |
Die
Diagramme zeigen, wie aus den Steuerimpulsen
(schwarz) und
den internen Referenzimpulsen
von 1,5 ms Länge (blau) Differenzimpulse (rot) gebildet
werden, die schließlich durch Impulsdehnung in
impulsbreitenmodulierte Motorsteuerimpulse umgewandelt werden Bei den drei Diagrammen in der linken Spalte ist die Länge der Steuerimpulse kleiner als die Länge der Referenzimpulse (das ergibt Rückwärtsfahrt), bei den Diagrammen in der rechten Spalte ist die Länge der Steuerimpulse größer als 1,5 ms (Vorwärtsfahrt). |
|
Das Ausmaß der Impulsdehnung wird von C6 und R6 (NE544) bzw. Cd und Rb (M51660L) bestimmt. Mit C6 = 1 µF und R6 = 15 kOhm ist die Impulsdehnung so groß, dass bei 1,0 ms Impulsabstand der Ausgang A, und bei 2,0 ms Impulsabstand der Ausgang B gerade dauernd auf 5 V geschaltet werden. Bei Verringerung des Wertes von R6 auf 12 kOhm wird die Impulsdehnung etwas kleiner, damit wird die Regelungsmöglichkeit bei geringen Geschwindigkeiten (Rangiergang) etwas verbessert, aber auch die maximale Geschwindigkeit herabgesetzt. Bei einer Rangierlok sollte daher für R6 ein Wert von 12 kOhm, bei einer Schnellzuglok von 15 kOhm gewählt werden. Die Impulsspannung an den Ausgängen des IC beträgt allerdings nur 5 V und kann auch nicht die für Lokomotivmotoren nötige Leistung zur Verfügung stellen, so dass zur Spannungs- und Leistungsanpassung eine zusätzliche Verstärkerstufe nötig wird: Der Schaltverstärker besteht aus einer Brücke aus vier Darlingtontransistoren (T3/T4 und T6/T7), in deren Diagonalen der Motor geschaltet ist. Steuern beispielsweise positive Steuerimpulse vom Decoderausgang A über R7 den Transistor T3 auf, so wird über R15 gleichzeitig T7 geöffnet. Folglich liegt der im Schaltplan links gezeichnete Motoranschluss am Minuspol, der rechte am Pluspol der Fahrspannung. Die Motorspannung folgt dabei den Steuerimpulsen, die IC3 abgibt. Umgekehrte Polaritätsverhältnisse ergeben sich aus Steuerimpulsen am B-Ausgang des Decoders. Die Bauelemente um T2 und T5 dienen der Störimpulsunterdrückung. So sind selbst bei sauberen Gleisen, Rädern und Stromabnehmern Kontaktunterbrechungen im System Schiene/Rad nicht zu vermeiden. Dadurch allerdings kommt die Synchronisation der Steuerimpulse im Decoder kurzzeitig durcheinander und es ist möglich, dass der Motor sogar sehr kurz umgepolt wird. Die Folge wäre ein "unrunder" Lauf des Lokmotors. Durch das Integrationsglied R13/C8 wird bei positiven Impulsen am Ausgang A des Decoders und das zeitverzögerte Durchschalten des Transistors T5 die Basis von T4 an Masse gelegt. Ein kurzzeitiger Impuls an B kann also T4 nicht aufsteuern. Fehlen Impulse an A, kann sich C8 über R12 und T5 entladen, so dass erst nach einer geringen Verzögerung Steuerimpulse an B zur Umkehrung der Motorlaufrichtung führen können. Analoge Funktion haben die Bauelemente R9, R10, C7 und T2. Zur weiteren Störimpulsunterdrückung kann ein Entstörglied aus einem 15 Ohm-Widerstand und einem in Reihe mit dem Widerstand geschalteten 1µF-10µF-Tantal-Kondensator zwischen den Emitteranschlüssen der Transistoren T6 und T7 und dem Minus-Anschluss (Emitter T3/T4) eingelötet werden. Für Wechselstrommotoren kann auf die Brückenschaltung verzichtet werden. Dazu wird zwischen den Kollektoren von T3 und T4 die Feldspule und an + (hinter D3) der Anker angeschlossen. Das Relais in der Lok zur Fahrtrichtungsumschaltung kann entfallen, wodurch gleichzeitig Raum zum Einbau eines Decoders gewonnen wird. Bei einem Wechselstrommotor wird anstelle eines Permanentmagneten, zwischen dessen Polen sich ein stromdurchflossener Anker bewegt, eine sogenannte Feldspule verwendet. Dadurch ändert sich das Statormagnetfeld im Takt der angelegten Wechselspannung. Weil sich gleichzeitig auch das Magnetfeld des Ankers ändert, bleiben die resultierenden Magnetkräfte gleich. Bei Märklin-Motoren wird eine Hintereinanderschaltung von Feldspule und Anker verwendet, die sogenannte Reihenschlussmaschine. Die Drehrichtungsumkehr erfordert, dass entweder nur im Anker oder nur in der Feldspule die Stromrichtung geändert wird. Bei Märklinmotoren ist dazu die Feldspule zweidrähtig gewickelt, so dass man effektiv zwei Feldspulen hat. Der Fahrtrichtungsumschalter wählt jeweils eine von beiden Spulen aus. Sie sind so angeschlossen, daß sich die Richtung des Statormagnetfeldes je nach Wicklung dabei umdreht. Ausführlichere
Informationen und Bauhinweise finden Sie in der Bauanleitung, die Sie
zum Download beim Autor beziehen können: Zum Download |
| Zum Seitenanfang |
© Bernd Raschdorf - Impressum -- Datenschutz